《2020版高考物理總復(fù)習(xí) 沖A方案 3+2+3沖A練(三)(含解析)新人教版》由會員分享���,可在線閱讀,更多相關(guān)《2020版高考物理總復(fù)習(xí) 沖A方案 3+2+3沖A練(三)(含解析)新人教版(7頁珍藏版)》請在裝配圖網(wǎng)上搜索�。
1��、3+2+3沖A練(三)
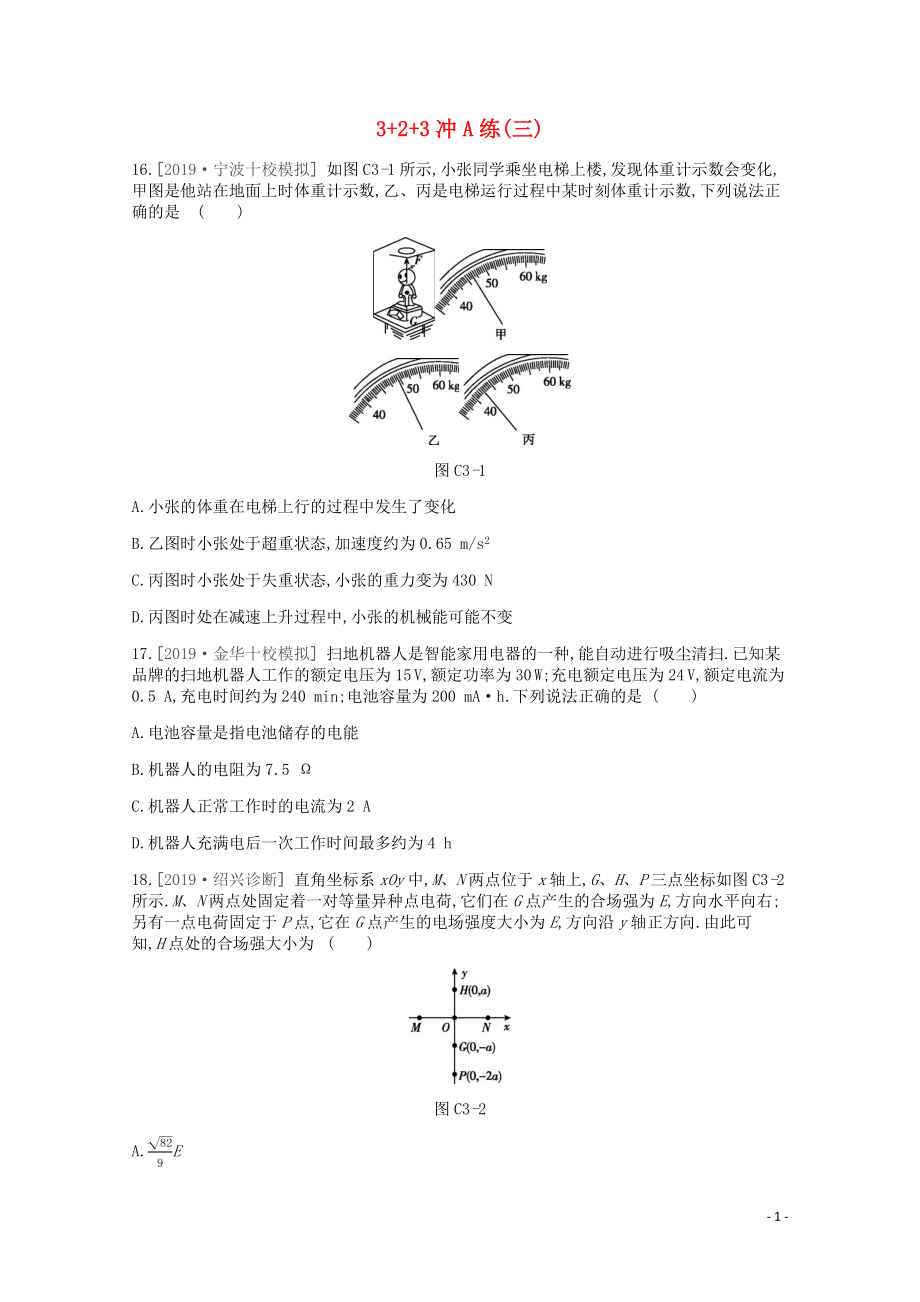
16.[2019·寧波十校模擬] 如圖C3-1所示,小張同學(xué)乘坐電梯上樓,發(fā)現(xiàn)體重計示數(shù)會變化,甲圖是他站在地面上時體重計示數(shù),乙�����、丙是電梯運行過程中某時刻體重計示數(shù),下列說法正確的是 ( )
圖C3-1
A.小張的體重在電梯上行的過程中發(fā)生了變化
B.乙圖時小張?zhí)幱诔貭顟B(tài),加速度約為0.65 m/s2
C.丙圖時小張?zhí)幱谑е貭顟B(tài),小張的重力變?yōu)?30 N
D.丙圖時處在減速上升過程中,小張的機械能可能不變
17.[2019·金華十校模擬] 掃地機器人是智能家用電器的一種,能自動進行吸塵清掃.已知某品牌的掃地機器人工作的額定電壓為15 V,額定
2�����、功率為30 W;充電額定電壓為24 V,額定電流為0.5 A,充電時間約為240 min;電池容量為200 mA·h.下列說法正確的是 ( )
A.電池容量是指電池儲存的電能
B.機器人的電阻為7.5 Ω
C.機器人正常工作時的電流為2 A
D.機器人充滿電后一次工作時間最多約為4 h
18.[2019·紹興診斷] 直角坐標(biāo)系xOy中,M、N兩點位于x軸上,G��、H��、P三點坐標(biāo)如圖C3-2所示.M�、N兩點處固定著一對等量異種點電荷,它們在G點產(chǎn)生的合場強為E,方向水平向右;另有一點電荷固定于P點,它在G點產(chǎn)生的電場強度大小為E,方向沿y軸正方向.由此可知,H點處的合場強大小為 (
3、)
圖C3-2
A.829E
B.174E
C.2E
D.109E
19.[2019·春暉中學(xué)模擬] 如圖C3-3所示,研究平拋運動規(guī)律的實驗裝置放置在水平桌面上,利用光電門傳感器和碰撞傳感器可測得小球的水平初速度和飛行時間,底板上的標(biāo)尺可以測得水平位移.保持水平槽口距底板高度h=0.420 m不變,改變小球在斜槽導(dǎo)軌上下滑的起始位置,測出小球做平拋運動的初速度v0���、飛行時間t和水平位移d,記錄在下表中.(空氣阻力可忽略)
圖C3-3
v0/(m/s)
0.741
1.034
1.318
1.584
t/ms
292.7
293.0
292.
4、8
292.9
d/cm
21.7
30.3
38.6
46.4
(1)由表中數(shù)據(jù)可知,在h一定時,小球水平位移d與其初速度v0成 關(guān)系.?
(2)一位同學(xué)計算出小球飛行時間的理論值t理=2hg=2×0.42010 ms=289.8 ms,發(fā)現(xiàn)理論值與測量值之差約為3 ms.經(jīng)檢查,實驗及測量無誤,其原因是 .?
(3)另一位同學(xué)分析并糾正了上述偏差后,另做了這個實驗,竟發(fā)現(xiàn)測量值t'依然大于自己得到的理論值t'理,但二者之差在3~7 ms之間,且初速度越大則差值越小.對實驗裝置的安裝進行檢查,確認(rèn)斜槽槽口與底座均水平,則導(dǎo)致偏差的原因是
5���、 .?
20.[2019·桐鄉(xiāng)一中模擬] 小區(qū)藍牙門禁卡失效,小明換上一塊電池,但是問題依舊,他拆下此紐扣電池(如圖C3-4甲所示)去實驗室測定其電動勢和內(nèi)阻.
圖C3-4
(1)先用多用電表直流5 V擋位對電池電動勢進行粗測,結(jié)果如圖乙所示,示數(shù)為 V.?
(2)小明進一步設(shè)計了精確測量電池電動勢和內(nèi)阻的電路,請幫助他完成實物連線.
(3)小明將實驗數(shù)據(jù)繪成U-I圖線,如圖戊所示,可知電池電動勢測量值為 V,測量值 (選填“大于”“等于”或“小于”)電動勢的真實值.?
(4)請用數(shù)據(jù)分析門禁卡失效的原因:?
.?
21.在
6、傾角為30°的光滑斜面上垂直于紙面放置一段長為L����、質(zhì)量為m的直導(dǎo)體棒.一勻強磁場垂直于斜面向上,如圖C3-5所示.當(dāng)導(dǎo)體棒內(nèi)通有垂直于紙面向里的電流I時,導(dǎo)體棒恰好靜止在斜面上,求磁感應(yīng)強度的大小.(重力加速度為g)
圖C3-5
22.如圖C3-6所示,一足夠長的斜面傾角為37°,斜面BC與水平面AB平滑連接,質(zhì)量m=2 kg的物體靜止于水平面上的M點,M點與B點之間的距離L=9 m,物體與水平面和斜面間的動摩擦因數(shù)均為μ=0.5.現(xiàn)使物體受到一水平向右的恒力F=14 N作用,運動至B點時撤去該力.sin 37°=0.6,cos 37°=0.8,g取10 m/s2.
7��、
(1)物體在恒力作用下運動時的加速度是多大?
(2)物體到達B點時的速度是多大?
(3)物體沿斜面向上滑行的最遠距離是多少?
圖C3-6
23.[2019·紹興診斷] 如圖C3-7所示,豎直平面內(nèi)半徑R=0.3 m的光滑半圓形管道BCD與傾角為30°的斜面在B點處平滑連接,A�����、D兩點等高,在A處固定一彈射器.質(zhì)量m=0.3 kg的小物塊(可看作質(zhì)點)從彈射器彈出后沿斜面下滑,到達B端時速度為26 m/s.已知小物塊與斜面間的動摩擦因數(shù)μ=33,g取10 m/s2,求:
(1)彈簧的彈性勢能;
(2)小物塊在D點時對管道的作用力大小;
(3)小物塊從D點飛出后落
8、在斜面上的位置.
圖C3-7
3+2+3沖A練(三)
16.B [解析] 超重與失重過程中,人的質(zhì)量不變.由甲圖中可知,人的質(zhì)量為46.5 kg,在乙圖中,讀數(shù)為49.5 kg,根據(jù)牛頓第二定律得a=495-46546.5 m/s2=0.65 m/s2,選項A���、C錯誤,B正確;人在乘電梯上升中,無論是加速上升還是減速上升,支持力都做正功,因而人的機械能都是增加的,選項D錯誤.
17.C [解析] 掃地機器人工作時額定電流為I=PU=2 A,但它并不是純電阻元件,所以內(nèi)阻無法直接計算,選項B錯誤,C正確;電池容量是指電池儲存的電荷量,選項A錯誤;充滿電的電池儲存的電荷量為
9�����、0.2 A·h,正常工作時電流為2 A,因此能夠工作時間為0.1 h,選項D錯誤.
18.A [解析] 根據(jù)點電荷的電場強度E=kQr2 可知,P處點電荷在H處產(chǎn)生的電場強度E'=19E,方向沿y軸正方向,由于對稱性,M、N處的點電荷在H����、G兩處產(chǎn)生的合電場強度大小和方向相同,所以H處的合場強為E=19E2+E2=829E,選項A正確.
19.(1)正比 (2)重力加速度g取了10 m/s2 (3)光電門傳感器位于水平槽口的內(nèi)側(cè),傳感器的中心距離水平槽口(小球開始做平拋運動的位置)還有一段很小的距離
[解析] (1)由表中數(shù)據(jù)可知,在h一定時,小球水平位移d與其初速度v0成正比.
(2
10�、)根據(jù)t=2hg求解出的t偏小,是因為重力加速度數(shù)值取了10 m/s2,即g值偏大造成的.
(3)導(dǎo)致偏差的原因是:光電門傳感器位于水平槽口的內(nèi)側(cè),傳感器的中心距離水平槽口(小球開始做平拋運動的位置)還有一段很小的距離,小球經(jīng)過傳感器到達拋出點還有一段很小的時間,而且速度越大,該時間越短.
20.(1)3.79 (2)如圖所示 (3)2.0 小于 (4)電池內(nèi)阻太大,內(nèi)阻分壓過多,電池輸出電壓太低而造成門禁卡無法正常工作
21.mg2IL
[解析] 對導(dǎo)體棒受力分析,如圖所示
由平衡條件得F=mgsin θ
安培力F=BIL
解得B=mg2IL.
22.(1)2 m/s
11�、2 (2)6 m/s (3)1.8 m
[解析] (1)在水平面上,根據(jù)牛頓第二定律得F-μmg=ma
解得a=2 m/s2
(2)從M到B,根據(jù)速度與位移公式得vB2=2aL
解得vB=6 m/s
(3)在斜面上,根據(jù)牛頓第二定律得mgsin θ+μmgcos θ=ma'
解得a'=10 m/s2
根據(jù)速度與位移公式得vB2=2a'x
解得x=1.8 m
23.(1)3.6 J (2)9 N (3)距離B點0.8 m(或距離A點0.4 m)
[解析] (1)小物塊被彈出后直至到達B點的過程,根據(jù)動能定理得
W彈+(mgsin 30°-μmgcos 30°)·LAB=12
12���、mvB2-0
LAB=2Rsin30°
解得W彈=3.6 J
由功能關(guān)系知,彈簧的彈性勢能Ep=3.6 J
(2)小物塊沿BCD管道運動過程,根據(jù)機械能守恒定律得12mvD2+mg·2R=12mvB2
假設(shè)物塊在D點處受到的作用力FN向下,根據(jù)牛頓第二定律得FN+mg=mvD2R
聯(lián)立解得FN=9 N
由牛頓第三定律知,物塊在D點時對管道的作用力F'N=FN=9 N
(3)以D點為坐標(biāo)原點,水平向右為x軸,豎直向下為y軸,建立坐標(biāo)系,飛行t時間后撞在斜面上P點,則有y=12gt2,x=vDt
又知tan 30°=2R-yx
聯(lián)立解得t=0.2 s,x=0.43 m
則PB=xcos30°=0.8 m
所以P點距離B點0.8 m(或P點距離A點0.4 m)
- 7 -
 2020版高考物理總復(fù)習(xí) 沖A方案 3+2+3沖A練(三)(含解析)新人教版
2020版高考物理總復(fù)習(xí) 沖A方案 3+2+3沖A練(三)(含解析)新人教版