《機(jī)械結(jié)構(gòu)與傳動(dòng)課程設(shè)計(jì)圓柱坐標(biāo)工業(yè)機(jī)械手》由會(huì)員分享�����,可在線閱讀����,更多相關(guān)《機(jī)械結(jié)構(gòu)與傳動(dòng)課程設(shè)計(jì)圓柱坐標(biāo)工業(yè)機(jī)械手(2頁珍藏版)》請?jiān)谘b配圖網(wǎng)上搜索����。
1、機(jī)械結(jié)構(gòu)與傳動(dòng)課程設(shè)計(jì)
1 設(shè)計(jì)題目
代做CAD圖紙說明書���,加Q_ Q
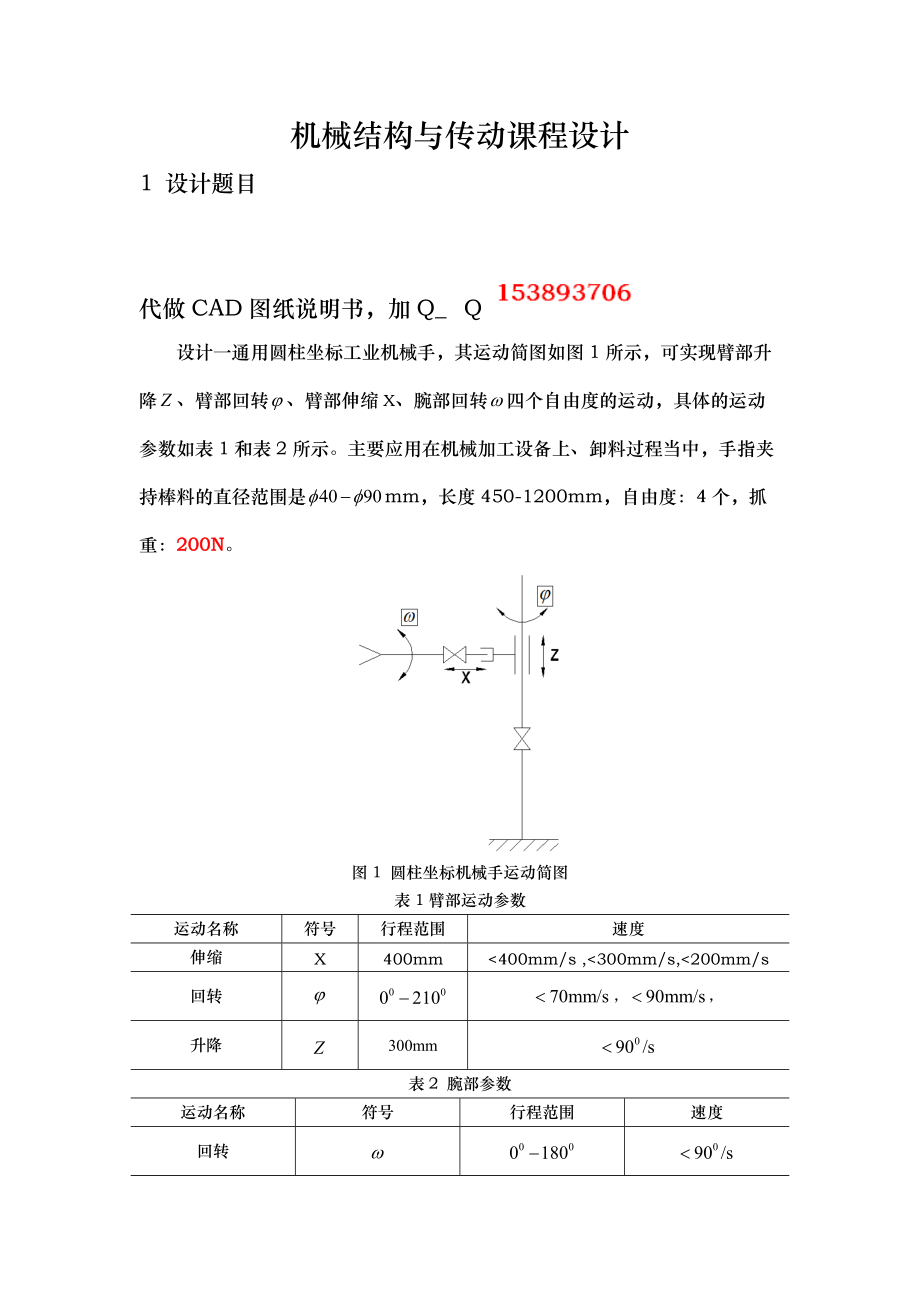
設(shè)計(jì)一通用圓柱坐標(biāo)工業(yè)機(jī)械手���,其運(yùn)動(dòng)簡圖如圖1所示,可實(shí)現(xiàn)臂部升降、臂部回轉(zhuǎn)��、臂部伸縮X�、腕部回轉(zhuǎn)四個(gè)自由度的運(yùn)動(dòng),具體的運(yùn)動(dòng)參數(shù)如表1和表2所示�。主要應(yīng)用在機(jī)械加工設(shè)備上�����、卸料過程當(dāng)中,手指夾持棒料的直徑范圍是mm,長度450-1200mm���,自由度:4個(gè)��,抓重:200N�����。
圖1 圓柱坐標(biāo)機(jī)械手運(yùn)動(dòng)簡圖
表1臂部運(yùn)動(dòng)參數(shù)
運(yùn)動(dòng)名稱
符號(hào)
行程范圍
速度
伸縮
X
400mm
<400mm/s ,<300mm/s,<200mm/s
回轉(zhuǎn)
�,���,
升降
300mm
表
2�����、2 腕部參數(shù)
運(yùn)動(dòng)名稱
符號(hào)
行程范圍
速度
回轉(zhuǎn)
2 設(shè)計(jì)要求
2.1 機(jī)械結(jié)構(gòu)設(shè)計(jì)
擬定機(jī)械手工作流程并制定相應(yīng)的液壓驅(qū)動(dòng)控制方案����,在此基礎(chǔ)上完成手部夾持傳力機(jī)構(gòu)����、臂部升降��、臂部回轉(zhuǎn)�、臂部伸縮�、腕部回轉(zhuǎn)的機(jī)械結(jié)構(gòu)設(shè)計(jì)��,進(jìn)一步對機(jī)械手各部分結(jié)構(gòu)進(jìn)行整合����,完成整體性裝配設(shè)計(jì)�����。
2.4 設(shè)計(jì)說明書編寫與圖紙規(guī)范
整理前階段設(shè)計(jì)資料�����,形成系統(tǒng)性��、邏輯性較強(qiáng)的說明書一份���。
3 其他說明
3.1組隊(duì)方式
3.2 提交方式
1)提交AUTOCAD版的1張裝配圖�,4張零件圖(抓手����、臂部����、腕部��、機(jī)座)����。
2)提交至少30頁的作品說明書一份。
4 主要參考文獻(xiàn)
[1] 工業(yè)機(jī)械手圖冊編寫組.工業(yè)機(jī)械手圖冊[M]�,北京:機(jī)械工業(yè)出版社�����,1978
[2] 劉文波�,陳白寧�����,段智敏.工業(yè)機(jī)器人[M]�,東北大學(xué)出版社,2007
[3]張利平. 液壓站[M].北京:化學(xué)工業(yè)出版社�����,2008
[4] 《機(jī)械設(shè)計(jì)手冊》編委.機(jī)械設(shè)計(jì)手冊[M].北京:機(jī)械工業(yè)出版社,2007
[5] 劉延俊.液壓回路與系統(tǒng)[M].北京:化學(xué)工業(yè)出版社��,2009
[6] 王守城����,段俊勇.液壓系統(tǒng)PLC控制實(shí)例精解[M].北京:中國電力出版社�,2011
 機(jī)械結(jié)構(gòu)與傳動(dòng)課程設(shè)計(jì)圓柱坐標(biāo)工業(yè)機(jī)械手
機(jī)械結(jié)構(gòu)與傳動(dòng)課程設(shè)計(jì)圓柱坐標(biāo)工業(yè)機(jī)械手